Figuring out how much grey water went through this machine was pretty complicated. We kept a logbook, but I worried that it would be honored “more in the breach than in the observance,” as my friend Cheddar said. He was right. 
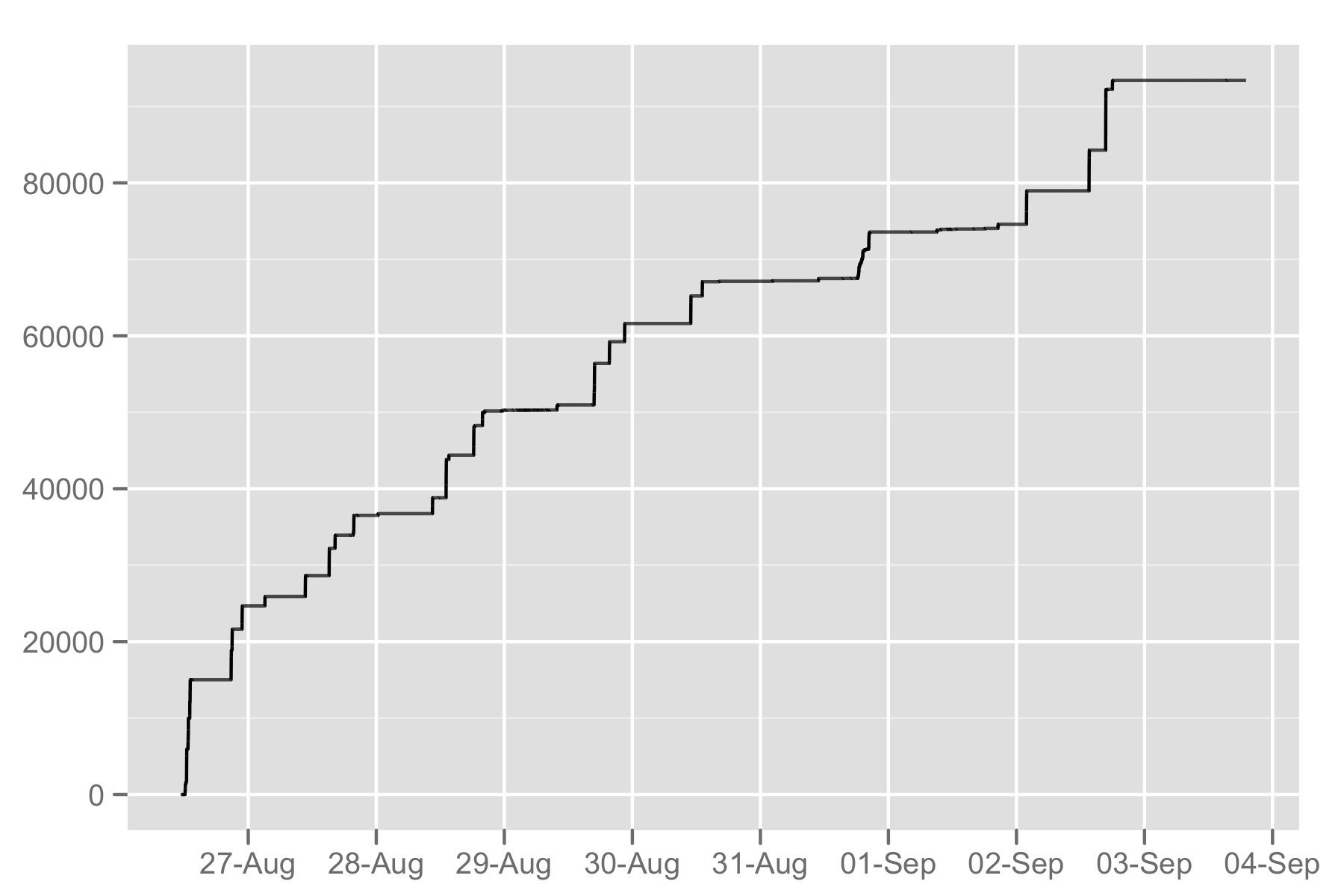
This graph shows the cumulative number of pulses recorded by a flow sensor attached to the filter bucket. All the grey water put into the evapotron went through this sensor. One key finding from this graph is that there are many, many more upward steps in the graph than records in the logbook. People put grey water into the system frequently without recording it. Cheddar worried about this on the last day (when a LOT of grey water went in, starting just after midnight on Sunday 2 Sep: what were people doing putting grey water into the evapotron a couple of hours after the Burn?). However, it seems that people put the odd one or two gallons in throughout the week.
In tests before I built the evapotron, I found that the flow sensor is extremely imprecise. Although it is rated at 192 pulses/liter, in tests I recorded from 160-240 pulses/liter. Given a final count of 93395 pulses, that suggests 128 gallons, in a possible range of 102-153 gallons.
This estimate probably overstates the total because there was about 8 gallons in the system that had to be brought home at the end. Still, given that it ran for 8.5 days, this represents 15 gallons/day (in a range of 12-18 gallons/day).
And there was a second evapotron running. It didn’t do as well, but it handled another 70 or so gallons. Between the two evapotrons, I estimate that we eliminated three-quarters of a ton of grey water. I’m calling this one a success, though there are many lessons learned and better stuff to build for next year.