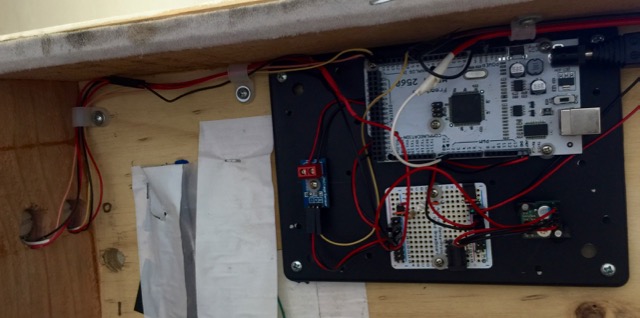
The animatronic tail I’m making for ❤ has a pretty simple UI: there’s one button. If you push the button, the tail wags. But if you double-click the button, the tail goes nuts.
Alas, buttons are noisy. As the button is pushed or released, there are many tiny little voltage surges as microscopic ridges and grooves in the switch touch and release as the connection is definitively made or broken. The Arduino sees these little surges and drops and thinks that the button is being pushed and released a few times in 10-20 milliseconds. This is called bouncing, and it is a Bad Thing.
There are tons of approaches for debouncing buttons in software. These all basically come down to ignoring the button for a while after detecting a change. That means that any additional real button presses also get ignored. It’s pretty hard to get the software tuned to ignore bouncing but detect double-clicking. People claim to have done it, but it didn’t work for me.
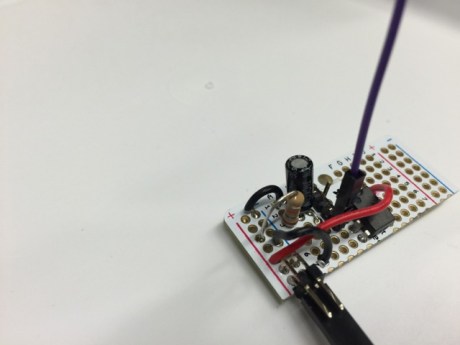
Debouncing in hardware is a little more involved: it involves building a small circuit with a resistor, a capacitor, and an op-amp integrated circuit. The circuit is called a Schmitt trigger, and the point is to sharpen a noisy set of voltage shifts into a nice square wave: either the button is pushed or it is not pushed, there is no bouncy jiggling.
There are several ways to build a Schmitt trigger, and my hack is shown in the photo. I used a 10KΩ resisistor, a 10㎌ capacitor, and a LMP358 op-amp chip.
I got the design from Jeremy Blum’s excellent tutorial on this topic. I’ve tested it, and it works incredibly well. Very smooth, no extraneous clicks, and the software no longer has to ignore the button in delay patterns. Yay!